
Newton's Laws of Dynamics
Ancient Philosophers were quite confused about the motion of objects. What's the cause of motion? What is the nature of the cause? This confusion about objects persisted until 17th century wh...
Introduction
Force, being a vector quantity can be added up or subtracted according to vector laws. So when a number of forces act on a body it can be at rest. We then say that the body is in equilibrium.
For the body to be in translational equilibrium, the resultant of all forces must be zero,
ΣF = 0
A rigid body can also be in rotational equilibrium. The turning effect of force is called torque. For rotational equilibrium, the sum of all the torques acting on the body must be zero.
Στ = 0
Coplanar Forces
Forces acting in a single plane or in a same plane are called coplanar forces. If only two forces act through a point, they must be coplanar. However none parallel forces that do not act through a point cannot be coplanar. Three or more non-parallel forces acting through a point may not be coplanar.
Moment of Force
One of the effects of the force on a body is to produce rotational motion. The rotational effect of the force depends on its magnitude and on the perpendicular distance of line of action of force from the axis is rotation. The perpendicular distance of line of force from axis of rotation is called moment arm.
The product of the force and the moment arm is called moment of force or torque.
τ = r F
Torque is a vector and in vector form,
The direction of the torque is determined by the right hand rule. The unit of torque is N m. When we open or close a door, we apply a torque. It is observed that the moment of a force about a point through which the axis of rotation passes is zero.
Clockwise and Anticlockwise moments
As shown in the fig below, O is the point of rotation. Forces F1 and F2 are at perpendicular distance of r1 and r2 from O. The effect of the force F1 is to rotate the body in anticlockwise direction and that of F2 is to rotate in clockwise direction. The moment of force due to F1 is called anticlockwise moment and due to F2 is called clockwise moment.

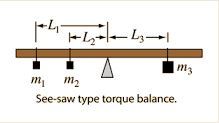
Principle of moment
It states that when a body is in equilibrium under the action of a number of forces, then the algebraic sum of the moments of all these forces about any point is zero. That is, sum of clockwise moments must be equal to the sum of anticlockwise moments.
Let us consider a metre scale is in equilibrium under the action of forces F1, F2, F3, F4 and F5 at points P, Q, R, S and T respectively as shown in Fig. The metre scale is supported at point O. The forces F1 and F1 produce anticlockwise moment while the forces F1, F1 and F1 produce clockwise moments. Then
sum of anticlockwise moments about O= F1 * OP + F2 *OQ

sum of clockwise moments about O= F3 *OR + F4 *OS + F5 *OT
According to the principle of moment,
sum of anticlockwise moment = sum of clockwise moments
or, F1 * OP + F2 * OQ = F3 *OR + F4 * OS + F5 *OT
Parallel Forces
When a number of forces act on a body and their directions are parallel, they are called parallel forces. There are two types of parallel forces. They are;
· Like parallel forces: If the parallel forces are acting in the same direction, they are called like parallel forces.
· Unlike parallel forces: If the parallel forces are acting in the opposite directions, they are called unlike parallel forces.
In the following figures, the forces F1 and F2 are like parallel forces and the forces F3 and F4 are a pair of unlike parallel forces.
Torque due to a couple
Two equal and opposite forces acting on a body such that their lines of action do not coincide constitute a couple. The action of a couple is to produce rotational motion of a body. As shown in Fig below, both forces produce anticlockwise rotation on the rod AB about O. So, the moment of a couple is the sum of the moment of the two forces.

Torque about O= Moment of force F at A + Moment of force F at B
= F * AO + F * OB
= F (AO + OB)
= F *AB
τ = F * AB
Some examples of couple are turning a tap, turning a cork screw, turning a screw driver and a compass needle in the earth's magnetic field.
Centre of Gravity
The centre of gravity (CG) of a body is a point where the weight of the body acts and total gravitational torque on the body is zero.
Shape of a Body and the Position of its Centre of Gravity
The centre of gravity of a body depends on the shape and size of the body. The C.G., of different shape of bodies are given in the following table.
| S.N | Shape of Body | Position of C.G. |
| 1. | Thin uniform bar | Middle point of the bar. |
| 2. | Circular ring | Centre of the ring. |
| 3. | Circular disc | Centre of the disc. |
| 4. | Sphere, hollow sphere and annular disc | At centre. |
| 5. | Cubical or rectangular block | Point of intersection of the diagonals. |
| 6. | Triangular lamina | Point of intersection of the medians. |
| 7. | Square lamina, parallelogram and rectangular lamina | Point of intersection of the diagonals. |
| 8. | Cylinder | Middle point of the axis. |
| 9. | Cone or pyramid | On the line joining the apex to the centre of the base at a distance equal to ¼ of the length of this line from the base. |








