Newton's Laws of Dynamics
Ancient Philosophers were quite confused about the motion of objects. What's the cause of motion? What is the nature of the cause? This confusion about objects persisted until 17th century wh...

Introduction
Force, being a vector quantity, can be added up or subtracted according to vector laws. So when a number of forces act on a body it can be at rest. We then say that the body is in equilibrium.
For the body to be in translational equilibrium, the resultant of all the force must be zero,
∑F=0
A rigid body can also be in rotational equilibrium. The turning effect of force is called torque. For rotational equilibrium, the sum of all the torques acting on the body must be zero,
∑τ=0
Forces acting in a single plane or in a same plane are called coplanar force. However non parallel forces that do not through a point can’t be coplanar.
Moment of a Force
One of the effects on a body is to produce rotational motion. The product of force and the momentum arm is called momentum arm is called moment of force or torque.
τ = rF
Torque is a vector form. The direction of the torque is determined by the right hand rule. The unit of torque is Nm. When we open and close a door, we apply a torque.
Clockwise and Anticlockwise Moments
For any point of rotation there are two moments (i.e. Clockwise and clockwise moment) which balances the body in erect position.
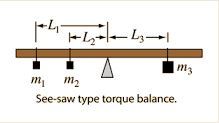
Principle of Moment
It states that when a body is in equilibrium under the action of a number of forces, then the algebraic sum of the momentums of all these forces about any point is zero. This concludes that sum of clockwise momentum must be equal to the sum of anticlockwise moments.
Here,
Sum of anticlockwise moments=sum of clockwise moments
Parallel forces
When a number of forces act on a body and their directions are parallel, they are called parallel forces. Parallel forces are of two types i.e. Like parallel forces and unlike parallel forces. On the other hands, if they are acting in the opposite direction, they are called unlike forces.
Center of gravity
The center of gravity of a body is a point where the weight of the body acts and gravitational torque of the body remains zero. When a body is lying on the surface of earth, then the weight of the body acts at the center of the gravity. For a body of small size, having uniform density throughout, the CG of the body coincides with the center of mass. In case of solid sphere, both CG and center of mass lies at center of the sphere. For a body of very large dimensions and having non uniform density, the centre of gravity does not coincide with the center of mass.
Shape of a body and position of CG
S.No. Shape of body Position of C.G.
1 The uniform bar Middle point of the bar.
2 Circular ring Centre of ring
3 Circular disc Centre of the disc
4 Sphere ,hollow sphere and annual disc At centre
5 Cubical or rectangular block Point of intersection of diagonals
6 Triangular lamina Point of intersection of medians
7 Square lamina, parallelogram, and rectangular lamina Point of intersection of diagonals
8 Cylinder Midpoint of axis
Center of mass
A rigid body contains a large number of particles and the mass of the body is the sum of the mass of individual masses. But, we can consider a point in the body such that whole mass of the body is concentrated in it and the motion of that point is same as the motion of particle of the same mass at that of the body when the same force is applied on it.
Calculation of center of mass
X=∑mx/M
Y=∑my/M
Conditions of stable equilibrium
Following are the important conditions for a body to be in stable equilibrium.
The C.G. of a body should lie as low as possible.
The base of body should be as large as possible.
C.G. should lie within the base of the body on displaced position.
Lami’s theorem
It states that if a particle is in equilibrium under the action of three concurrent forces, then each force is proportional to sine of the angle between the other two.
From Lami’s theorem,
AB/sin C=BC/sin A=CA/sin B